
Маркус Вандт, астронавт проекта Европейского космического агентства в миссии Ax-3 компании Axiom Space, находясь на Международной космической станции в январе 2024 года, управлял четвероногим роботом Бертом в Германии. Робот исследовал местность, похожую на инопланетную.
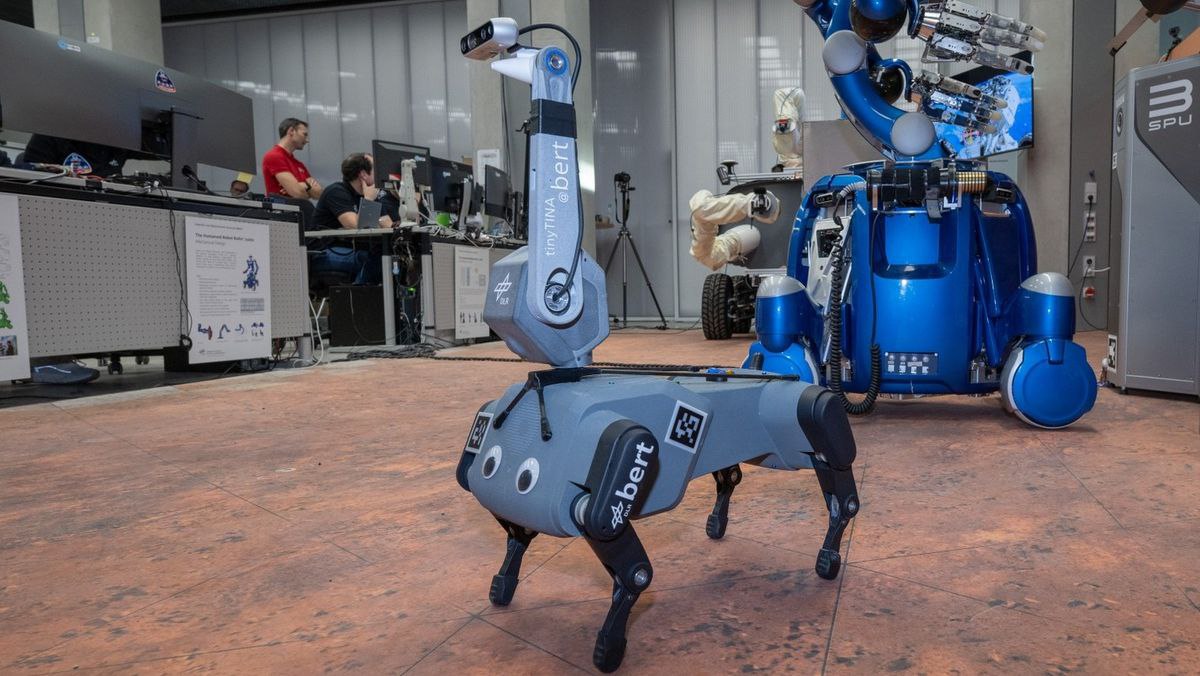
Робот в форме собаки с выпученными глазами и толстой антенной, служащей «головой», исследовал смоделированную планету. По заявлению руководителя проекта DLR (Немецкое космическое агентство), установка на робота ног вместо колес может позволить машинам легче взбираться на холмы на Марсе или на других планетах. До сих пор астронавты дистанционно управляли только колесными роботами, но Берт обучен разным типам походки. Благодаря перемещению на ногах он может двигаться по пересеченной местности, исследовать небольшие пещеры, до которых не могут добраться колесные роботы.
Чтобы обмениваться сигналами между Землей и Марсом, требуется несколько минут и необходимы новые методы работы в этой области. Астронавты на орбите также столкнутся с задержкой во времени в несколько секунд. Несмотря на то, что робот Берт носит экспериментальный характер, если технология выдержит все испытания, его могут использовать в дальнейшем для реальной миссии на Красной планете.