Большинство беспилотников имеют ограниченное время автономной работы. Увеличить его могла бы возможность закрепляться на окружающих объектах, чтобы, например, заряжаться от солнечной энергии и продолжать наблюдение. Один из способов садиться на ветку или перекладину предложили испанские и швейцарские инженеры.
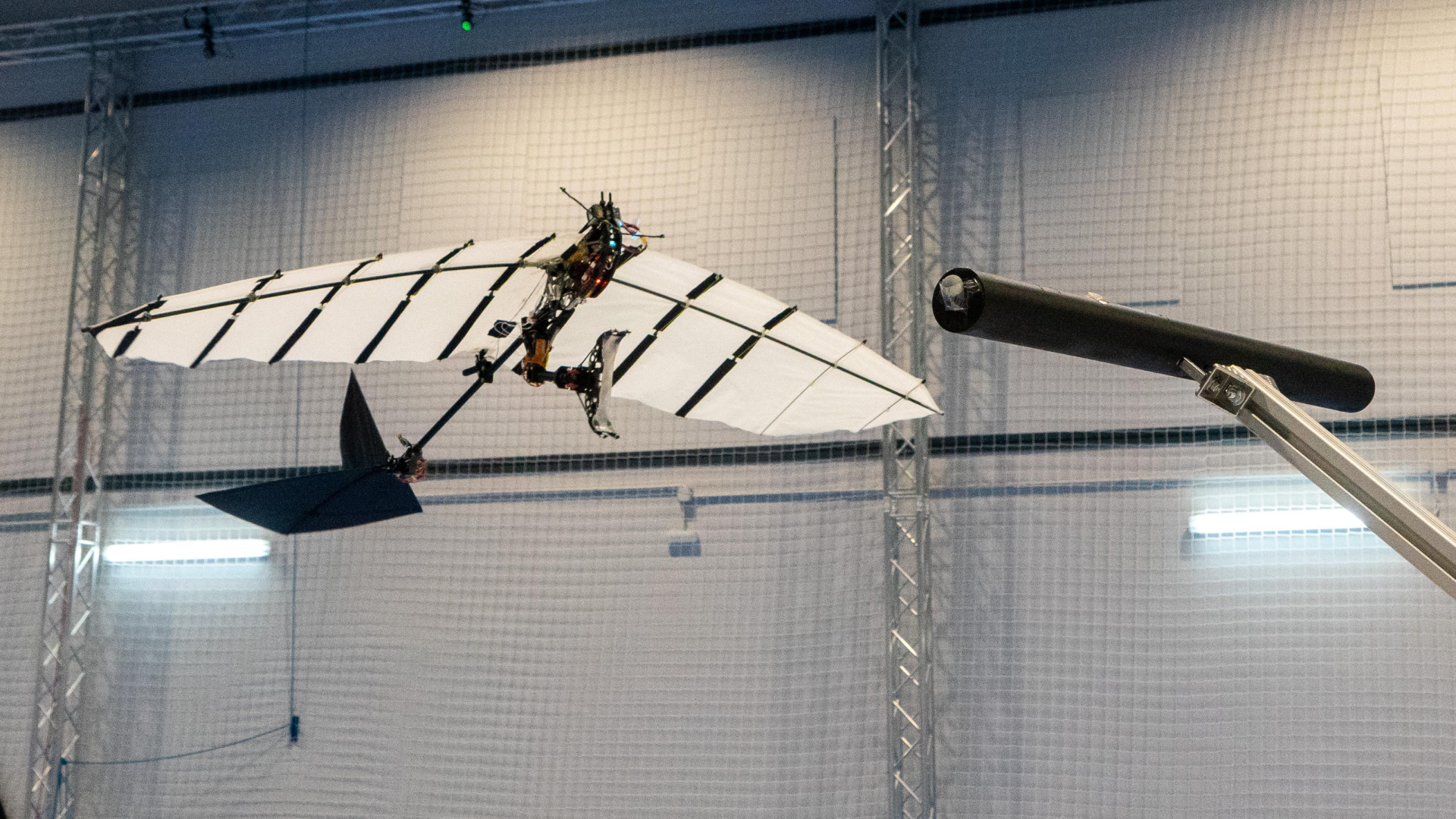
Специалисты оснастили прототип орнитоптера P-Flap подвижной лапой с механической клешней. Она выполнена из нескольких подвижных деталей: верхняя и нижняя часть хватательного элемента состоят из четырех карбоновых пластин, а за срабатывание механизма отвечает 40 миллиметровая пружина, действующая на обе половины захвата с силой 111 Ньютонов.
Как только жердь попадает в клешню, она ударяется о выступающие рычаги на скорости в несколько метров в секунду. Сопротивление передается пружине, которая попадает во внутреннюю область захвата, стягивая две его половины.
На сегодняшний день орнитоптер тестировался только в закрытом помещении. В будущем инженеры собираются выпустить версию коптера, которая сможет автономно летать и садиться на объекты за пределами лабораторий. Для этого специалистам потребуется разработать систему управления на основе информации с бортовых камер дрона.
«Как только орнитоптер научится самостоятельно садиться на ветку дерева, у него появится потенциал для выполнения конкретных задач, таких как незаметный сбор биологических образцов или измерений с дерева. В конечном итоге он сможет даже приземляться на искусственные сооружения», — рассказал Рафаэль Зуфферей, соавтор проекта.