Каких только роботов не существует в наше время – роботы, которые умеют ходить, видеть, разговаривать и слышать, а также манипулировать различными предметами. Есть даже роботы, способные ощущать запахи.
Но что насчет чувства осязания? На первый взгляд, вроде бы здесь все просто, и роботы, способные распознавать предметы через прикосновение, уже существуют, однако в используемых методах присутствует ряд ограничений. В частности, большинство роботизированных механизмов обладают лишь регуляцией силы нажатия.
Всем известно, что в жизни людей тактильные ощущения играют очень важную роль. Манипулируя предметом, человек фиксирует не только факт соприкосновения, но и ощущает давление руки на предмет через кожу и таким образом может регулировать усилие сжатия соответственно массе и прочности этого предмета. Если чувство осязания будет присутствовать у роботов в полной мере, то в процессе манипуляций с мягкими и хрупкими предметами возможность их повреждения сведется к минимуму или исключится совсем.
«Умная кожа»
Для количественного определения осязания с технологической точки зрения требуется не только знание силы внешнего давления, применяемой для осязательного датчика, — необходимо владеть информацией о точном месте нажатия, его угле и способе взаимодействия с объектом манипуляций.
Также нужно определить, какое количество датчиков осязания необходимо роботу. Разработка «кожи» робота, оснащенной сотнями и даже тысячами тактильных датчиков — очень сложная технологическая задача, при решении которой важно понимать и учитывать физические механизмы контактного восприятия в биологическом мире.
Чаще всего осязание измеряется при помощи датчика, способного преобразовать силу нажатия в электрический сигнал. Так, в электронных весах, при помощи которых мы узнаем своей вес или взвешиваем продукты на кухне, обычно используется пьезоэлектрический преобразователь — устройство, которое превращает силу давления в электричество. После этого электрический ток передается по проводам в небольшой микрочип, который считывает силу тока, преобразует ее в вес и отображает на экране.
Однако, несмотря на то, что подобные электронные устройства способны распознавать разные уровни силы давления, они не могут использоваться для смарт-кожи вследствие наличия ряда ограничений. В частности, они имеют относительно медленную скорость реакции на нажатие.
Существуют также виды датчиков, основанные на физическом изменении других электрических характеристик, таких как электрическая емкость и сопротивление. Данная технология используется, например, при производстве некоторых моделей мобильных телефонов и компьютеров.
В последние годы ученые усиленно (и успешно) работают над созданием тактильных датчиков, которые можно встраивать в мягкие и гибкие материалы – именно такая технология необходима для использования в смарт-коже роботизированных машин.
Тем не менее, большая часть всех этих разработок испытывает проблемы при контакте с влагой (вспомните, что происходит, когда вы прикасаетесь к сенсорному экрану смартфона мокрым пальцем).
Основной областью применения гибкого и надежного восприятия нажатия на сегодняшний день является медицина. Например, смарт-кожа может использоваться для восстановления сенсорной реакции у пациентов с повреждениями кожи или периферической нейропатией (онемением или покалыванием). Также ее можно применять при протезировании рук.
Недавно ученые Массачусетского технологического института (MIT) и Гарвардского университета разработали тактильную перчатку, функционирующую на основе искусственного интеллекта. Подобно руке человека, перчатка оснащена 548 датчиками, расположенными на трикотажной ткани, соединенной с пьезорезистивной пленкой (которая также реагирует на давление или растяжение), и объединенными сетью проводящих электродов. Это позволяет перчатке оценивать характеристики захватываемых предметов. Данная разработка открывает большие перспективы в области осязания роботов и может впоследствии использоваться при создании протезов и роботизированных инструментов захвата.
Тем не менее, аналогично всем остальным сенсорным интерфейсам, технология также не работает при контакте с водой.
Оптическое измерение силы нажатия
В этой связи ученые уже несколько лет работают над новым видом тактильного датчика, использующим для измерения «мягких прикосновений» тончайшие пленки органических светодиодов (OLED) и фотосенсоров (OPD). Обычно технология OLED используется в экранах телевизорах и смартфонов. Новый подход к измерению чувства осязания основан на осязании оптического давления. В случае успеха роботы в будущем смогут получить чувство осязания, в данный момент доступное только живым существам.
Элементы OLED (диоды или пиксели) обычно являются полностью реверсивными. Это значит, что помимо способности производить свет (как в случае с экраном телевизора), эти пиксели могут также его определять. Используя этот принцип, можно создать крошечный, светонепроницаемый, эластичный купол с отражающим покрытием, помещенный поверх нескольких OLED-пикселей. Если купол не тревожить, выпускаемый из центрального пикселя свет равномерно распределяется среди других пикселей под куполом.
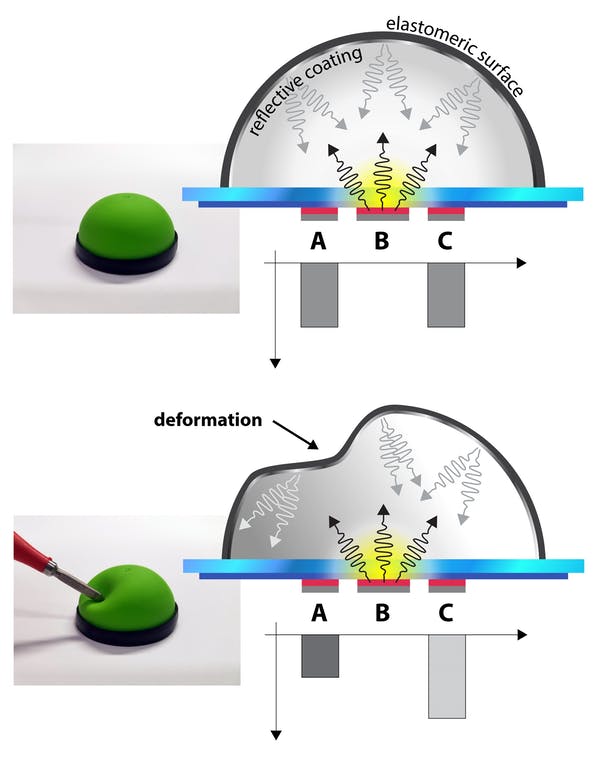
Однако если на купол нажать, прикасаясь к чему-либо, он деформируется в результате неравномерной реакции пикселей, используемых для определения отражаемого света. Соединив реакции десятков таких куполов в области контакта, можно будет оценить применяемую силу нажатия.
Данный подход является важным шагом на пути к созданию и использованию смарт-кожи. Вполне возможно, что очень скоро мы увидим роботов, способных чувствовать прикосновения, находясь не только в воздухе, но и под водой.